
Tim Walter
Doctoral Candidate, Technical University of MunichAbout Me
I am a doctoral candidate in the Cyber Physical Systems Group at the Technical University of Munich, supervised by Prof. Matthias Althoff .Before starting my PhD, I completed a M.Sc. degree in Computational Science and Engineering at TUM with my Master’s Thesis focusing on Leveraging Analytic Gradients for Provably Safe Reinforcement Learning . Prior I completed a dual study program with Rohde & Schwarz, where I completed an apprenticeship as an Electronics Technician for Information and Systems Technology, worked within the company for a cumulative time of 2 years, and earned a B.Eng. degree in Electrical Engineering and Information Technology from the University of Applied Sciences Munich, with my thesis focusing on outlier detection in manufacturing data for service predictions.
My current research interests lie in Reinforcement Learning, Modular Robotics and Algorithmic Design.
Publications
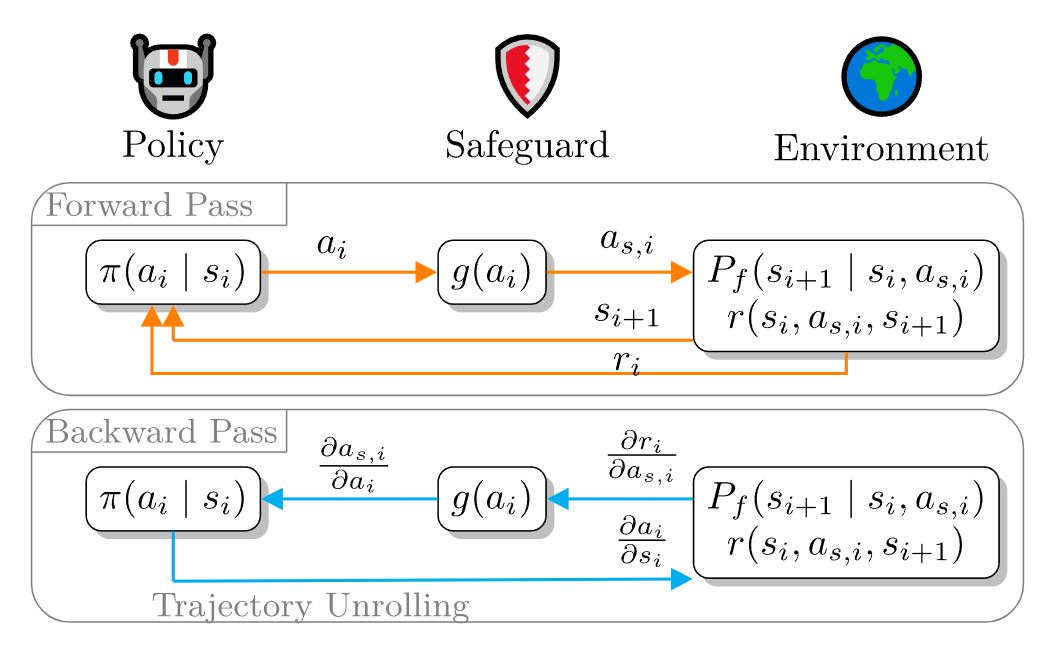
Leveraging Analytic Gradients in Provably Safe Reinforcement Learning
With SafeGBPO we developed the first effective safeguard for analytic gradient-based reinforcement learning. We analysed existing, differentiable safeguards, adapted them through modified mappings and gradient formulations, and integrated them into a state-of-the-art learning algorithm and a differentiable simulation.
BibTeX
@article{11154003,
author={Walter, Tim and Markgraf, Hannah and Külz, Jonathan and Althoff, Matthias},
journal={IEEE Open Journal of Control Systems},
title={Leveraging Analytic Gradients in Provably Safe Reinforcement Learning},
year={2025},
volume={4},
number={},
pages={463-481},
doi={10.1109/OJCSYS.2025.3607845}}

NeRSemble: Multi-view Radiance Field Reconstruction of Human Heads
NeRSemble reconstructs high-fidelity dynamic radiance fields of human heads. We combine a deformation for coarse movements with an ensemble of 3D multi-resolution hash encodings. These act as a form of expression-dependent volumetric textures that model fine-grained, expression-dependent details. Additionally, we propose a new 16 camera multi-view capture dataset (7.1 MP resolution and 73 frames per second) containing 4700 sequences of more than 220 human subjects.
BibTeX
@article{kirschstein2023nersemble,
author = {Kirschstein, Tobias and Qian, Shenhan and Giebenhain, Simon and Walter, Tim and Nie\ss{}ner, Matthias},
title = {NeRSemble: Multi-View Radiance Field Reconstruction of Human Heads},
year = {2023},
issue_date = {August 2023},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
volume = {42},
number = {4},
issn = {0730-0301},
url = {https://doi.org/10.1145/3592455},
doi = {10.1145/3592455},
journal = {ACM Trans. Graph.},
month = {jul},
articleno = {161},
numpages = {14},
}Teaching
Offered and supervised projects for teams of 2-4 students on the following topics:
- Differentiable Solver Unrolling for Safe RL
- Differentiable Implicit Projections for Safe RL